In Brief

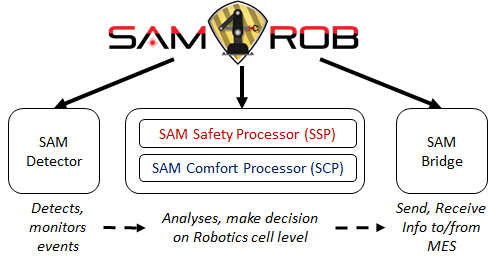
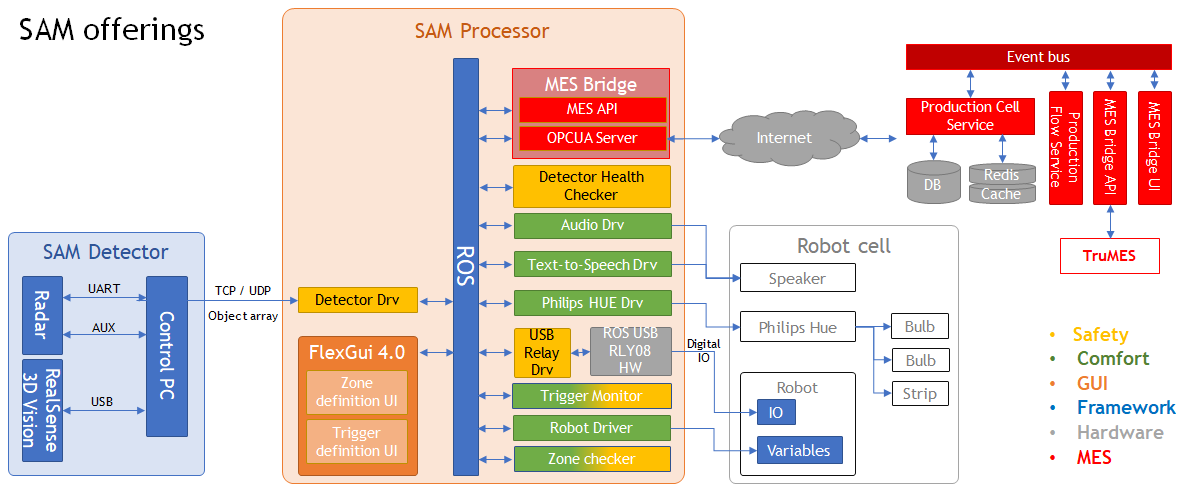
- SAM4ROB is a research project, funded by The Eurostars Programme; offering a Safe Area Monitoring (SAM) system for fenceless factory automation.
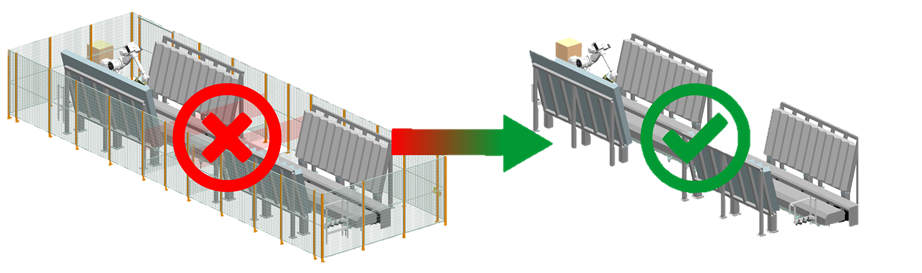
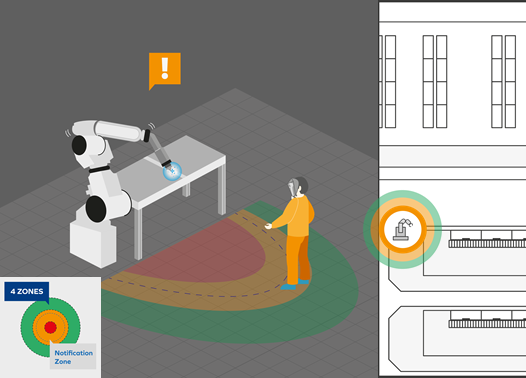
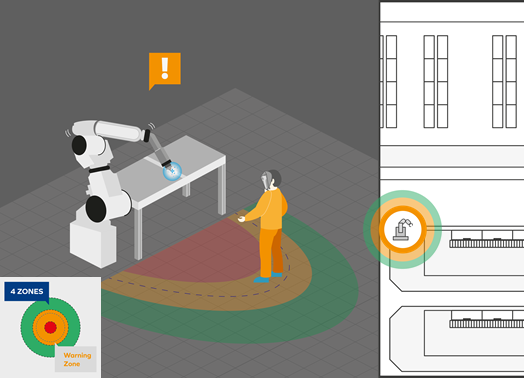
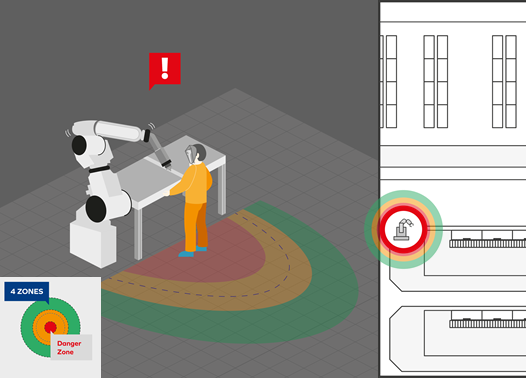
- SAM provides a natural, safe, synergic coexistence and collaboration between humans and robots even in harsh industrial environment

- SAM4ROB Consortium :
- 4 SMEs (PPM Robotics SA, YUJIN Mechatronics, DLM Solutions and F&P Robotics AG)
- 2 Research Institutions (DGIST, BME)